A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 11
Volume 11
Issue 11
IEEE/CAA Journal of Automatica Sinica
| Citation: | K. Nosrati, J. Belikov, A. Tepljakov, and E. Petlenkov, “Revisiting the LQR problem of singular systems,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 11, pp. 2236–2252, Nov. 2024. doi: 10.1109/JAS.2024.124665

|
In the development of linear quadratic regulator (LQR) algorithms, the Riccati equation approach offers two important characteristics—it is recursive and readily meets the existence condition. However, these attributes are applicable only to transformed singular systems, and the efficiency of the regulator may be undermined if constraints are violated in nonsingular versions. To address this gap, we introduce a direct approach to the LQR problem for linear singular systems, avoiding the need for any transformations and eliminating the need for regularity assumptions. To achieve this goal, we begin by formulating a quadratic cost function to derive the LQR algorithm through a penalized and weighted regression framework and then connect it to a constrained minimization problem using the Bellman’s criterion. Then, we employ a dynamic programming strategy in a backward approach within a finite horizon to develop an LQR algorithm for the original system. To accomplish this, we address the stability and convergence analysis under the reachability and observability assumptions of a hypothetical system constructed by the pencil of augmented matrices and connected using the Hamiltonian diagonalization technique.

| [1] |
S. L. Campbell, Singular Systems of Differential Equations. London, U.K.: Pitman, 1980.
|
| [2] |
N. R. Chowdhury, J. Belikov, D. Baimel, and Y. Levron, “Observer-based detection and identification of sensor attacks in networked CPSs,” Automatica, vol. 121, p. 109166, 2020. doi: 10.1016/j.automatica.2020.109166
|
| [3] |
Z. Zhong, X. Wang, and H. K. Lam, “Finite-time fuzzy sliding mode control for nonlinear descriptor systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 6, pp. 1141–1152, 2021. doi: 10.1109/JAS.2021.1004024
|
| [4] |
H. Bamberger, A. Wolf, and M. Shoham, “Assembly mode changing in parallel mechanisms,” IEEE Trans. Robot., vol. 24, no. 4, pp. 765–772, 2008. doi: 10.1109/TRO.2008.926863
|
| [5] |
P. Liu, Q. Zhang, X. Yang, and L. Yang, “Passivity and optimal control of descriptor biological complex systems,” IEEE Trans. Autom. Control, vol. 53, no. Special Issue, pp. 122–125, 2008. doi: 10.1109/TAC.2007.911341
|
| [6] |
Y. Han and S. Zhou, “Novel criteria of stochastic stability for discrete-time Markovian jump singular systems via supermartingale approach,” IEEE Trans. Autom. Control, vol. 67, no. 12, pp. 6940–6947, 2022. doi: 10.1109/TAC.2022.3200949
|
| [7] |
Z. Feng, J. Li, P. Shi, H. Du, and Z. Jiang, Analysis and Synthesis of Singular Systems. London, Academic Press, 2020.
|
| [8] |
L. Dai, Singular Control Systems. Berlin: Springer Verlag, 1989.
|
| [9] |
D. G. Luenberger, “Time-invariant descriptor systems,” Automatica, vol. 14, pp. 473–480, 1978. doi: 10.1016/0005-1098(78)90006-7
|
| [10] |
Z. Q. Ge, “Exact controllability and exact observability of descriptor infinite dimensional systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1956–1963, 2021. doi: 10.1109/JAS.2020.1003411
|
| [11] |
L. Pandolfi, “Controllability and stabilization for linear systems of algebraic and differential equations,” J. Optim. Theory Appl., vol. 30, pp. 601–620, 1980. doi: 10.1007/BF01686724
|
| [12] |
M. Darouach and M. Boutayeb, “Design of observers for descriptor systems,” IEEE Trans. Autom. Control, vol. 40, pp. 1323–1327, 1995. doi: 10.1109/9.400467
|
| [13] |
X. Lu, L. Wang, H. Wang, and X. Wang, “Kalman filtering for delayed singular systems with multiplicative noise,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 1, pp. 51–58, 2016. doi: 10.1109/JAS.2016.7373762
|
| [14] |
J. Y. Ishihara, M. H. Terra, and J. P. Cerri, “Optimal robust filtering for systems subject to uncertainties,” Automatica, vol. 52, pp. 111–117, 2015. doi: 10.1016/j.automatica.2014.10.120
|
| [15] |
Z. Shi and Z. Wang, “Optimal control for a class of complex singular system based on adaptive dynamic programming,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 188–197, 2019. doi: 10.1109/JAS.2019.1911342
|
| [16] |
S. Marir and M. Chadli, “Robust admissibility and stabilization of uncertain singular fractional-order linear time-invariant systems,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 3, pp. 685–692, 2019. doi: 10.1109/JAS.2019.1911480
|
| [17] |
K. Nosrati, J. Belikov, A. Tepljakov, and E. Petlenkov, “Extended fractional singular Kalman filter,” Appl. Math. Comput., vol. 48, p. 127950, 2023.
|
| [18] |
Y. Y. Wang, R. M. Frank, and D. J. Clements, “The robustness properties of the linear quadratic regulators for singular systems,” IEEE Trans. Autom. Control, vol. 38, no. 1, pp. 96–100, 1993. doi: 10.1109/9.186315
|
| [19] |
I. Qais and D. Pal, “The continuous-time singular LQR problem and the riddle of nonautonomous Hamiltonian systems: A behavioral solution,” IEEE Trans. Autom. Control, vol. 67, no. 9, pp. 4770–4777, 2022. doi: 10.1109/TAC.2022.3161373
|
| [20] |
T. Reis and M. Voigt, “Linear-quadratic optimal control of differential-algebraic systems: The infinite time horizon problem with zero terminal state,” SIAM J. Control. Optim., vol. 57, no. 3, pp. 1567–1596, 2019. doi: 10.1137/18M1189609
|
| [21] |
G. Duan, Analysis and Design of Descriptor Linear Systems. New York, NY, USA: Springer, 2010.
|
| [22] |
B. Gashi and H. Hua, “Optimal regulators for a class of nonlinear stochastic systems,” Int. J. Control, vol. 96, no. 1, pp. 136–146, 2023. doi: 10.1080/00207179.2021.1982014
|
| [23] |
H. Hua, B. Gashi, and H. Hua, “Robust risk-sensitive control,” Int. J. Robust Nonlinear Control, vol. 33, no. 10, pp. 5484–5509, 2023. doi: 10.1002/rnc.6655
|
| [24] |
D. J. Bender and A. J. Laub, “The linear-quadratic optimal regulator for descriptor systems: Discrete-time case,” Automatica, vol. 23, no. 1, pp. 71–85, 1987. doi: 10.1016/0005-1098(87)90119-1
|
| [25] |
D. J. Bender and A. J. Laub, “The linear quadratic optimal regulator for descriptor systems,” IEEE Trans. Autom. Control, vol. 32, no. 8, pp. 672–688, 1987. doi: 10.1109/TAC.1987.1104694
|
| [26] |
I. Qais, C. Bhawal, and D. Pal, “Optimal singular LQR problem: A PD feedback solution,” SIAM J. Control Optim., vol. 61, no. 4, pp. 2655–2681, 2023. doi: 10.1137/22M1496414
|
| [27] |
H. Xu and K. Mizukami, “The linear-quadratic optimal regulator for continuous-time descriptor systems: A dynamic programming approach,” Int. J. Syst. Sci., vol. 25, no. 11, pp. 1889–1998, 1994. doi: 10.1080/00207729408949319
|
| [28] |
V. Mehrmann, “Existence, uniqueness, and stability of solutions to singular linear quadratic optimal control problems,” Linear Algebra Appl., vol. 121, pp. 291–331, 1989. doi: 10.1016/0024-3795(89)90707-6
|
| [29] |
J. Heiland and E. Zuazua, “Classical system theory revisited for turnpike in standard state space systems and impulse controllable descriptor systems,” SIAM J. Control Optim., vol. 59, no. 5, pp. 3600–3624, 2021. doi: 10.1137/20M1356105
|
| [30] |
M. Muhafzan, “Use of semidefinite programming for solving the LQR problem subject to rectangular descriptor systems,” Int. J. Appl. Math. Comput. Sci., vol. 20, no. 4, pp. 655–664, 2010. doi: 10.2478/v10006-010-0048-9
|
| [31] |
T. Chiranjeevi and R. K. Biswas, “Linear quadratic optimal control problem of fractional order continuous-time singular system,” Procedia Comput. Sci., vol. 171, pp. 1261–1268, 2020. doi: 10.1016/j.procs.2020.04.134
|
| [32] |
A. Ilchmann, L. Leben, J. Witschel, and K. Worthmann, “Optimal control of differential-algebraic equations from an ordinary differential equation perspective,” Opt. Control Appl. Methods, vol. 40, no. 2, pp. 351–366, 2019. doi: 10.1002/oca.2481
|
| [33] |
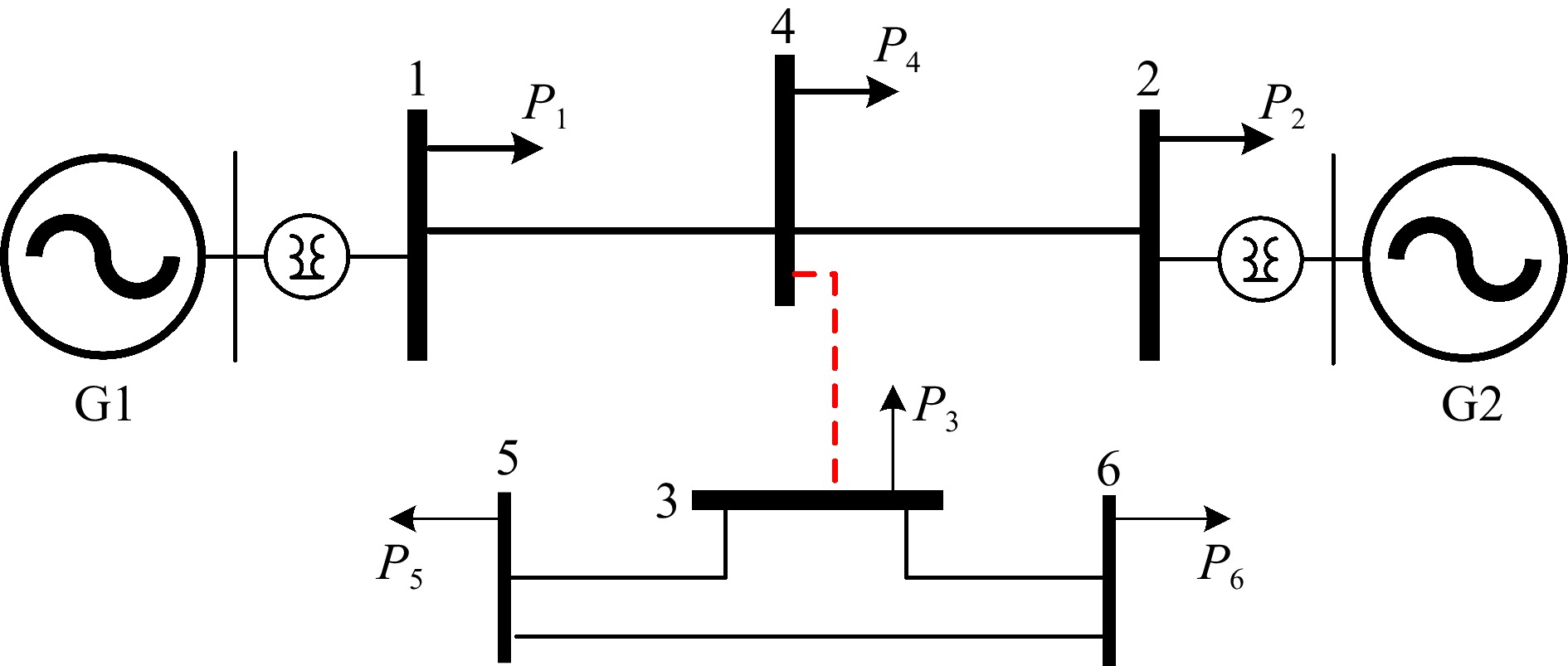
M. H. Kazma and A. F. Taha, “ODE transformations of nonlinear DAE power systems,” arXiv preprint arXiv: 2306.17658, 2023.
|
| [34] |
D. Patil, P. Tesi, and S. Trenn, “Indiscernible topological variations in DAE networks,” Automatica, vol. 101, pp. 280–289, 2019. doi: 10.1016/j.automatica.2018.12.012
|
| [35] |
S. A. Nugroho, A. F. Taha, N. Gatsis, and J. Zhao, “Observers for differential algebraic equation models of power nNetworks: Jointly estimating dynamic and algebraic states,” IEEE Trans. Control Netw. Syst., vol. 9, no. 3, pp. 1531–1543, 2022. doi: 10.1109/TCNS.2022.3158754
|
| [36] |
S. Chen, H. D. Nguyen, and C. Wen, “Small-signal stability of microgrids in DAE form under DoS Attacks with contraction analysis,” in Proc. IEEE Power Energy Soc. Innov. Smart Grid Technol. Conf., Feb. 2024, pp. 1–5.
|
| [37] |
T. GroB, S. Trenn, and A. Wirsen, “Solvability and stability of a power system DAE model,” Syst. Control Lett., vol. 97, pp. 12–17, 2016. doi: 10.1016/j.sysconle.2016.08.003
|
| [38] |
H. D. Nguyen, T. L. Vu, J. J. Slotine, and K. Turitsyn, “Contraction analysis of nonlinear DAE systems,” IEEE Trans. Autom. Control, vol. 66, no. 1, pp. 429–436, 2021. doi: 10.1109/TAC.2020.2981348
|
| [39] |
K. Nosrati, J. Belikov, A. Tepljakov, and E. Petlenkov, “Optimal robust filter of uncertain fractional order systems: A penalized deterministic approach,” IEEE Control Syst. Lett., vol. 7, pp. 1075–1080, 2022.
|
| [40] |
A. Ilchmann, J. Witschel, and K. Worthmann, “Model predictive control for singular differential-algebraic equations,” Int. J. Control, vol. 95, no. 8, pp. 2141–2150, 2022. doi: 10.1080/00207179.2021.1900604
|
| [41] |
R. Nikoukhah, A. L. Willsky, and B. C. Levy, “Boundary-value descriptor systems: Well-posedness, reachability and observability,” Int. J. Control, vol. 46, pp. 1715–1737, 1987. doi: 10.1080/00207178708934005
|
| [42] |
R. Nikoukhah, A. L. Willsky, and B. C. Levy, “Kalman filtering and Riccati equations for decriptor systems,” IEEE Trans. Autom. Control, vol. 37, no. 9, pp. 1325–1342, 1992. doi: 10.1109/9.159570
|
| [43] |
D. G. Luenberger, Linear and Nonlinear Programming. Boston: Kluwer Academic Publishers, 2003.
|
| [44] |
M. H. Terra, J. P. Cerri, and J. Y. Ishihara, “Optimal robust linear quadratic regulator for systems subject to uncertainties,” IEEE Trans. Autom. Control, vol. 59, no. 9, pp. 2586–2591, 2014. doi: 10.1109/TAC.2014.2309282
|
| [45] |
R. E. Bellman and S. E. Dreyfus, Applied Dynamic Programming. Princeton, NJ, USA: Princeton university Press, 2015.
|
| [46] |
K. Nosrati, J. Belikov, A. Tepljakov, and E. Petlenkov, “Penalized least-squares method for LQR problem of singular systems,” in Proc. IEEE Conf. Decision Control, pp. 1251–1256, 2023.
|
| [47] |
Y. Mehmood, G. Mustafa, A. Q. Khan, M. Abid, and M. Darouach, “Approximate discretization of regular descriptor (singular) systems with impulsive mode,” Automatica, vol. 73, pp. 231–236, 2016. doi: 10.1016/j.automatica.2016.07.017
|
| [48] |
P. V. Dooren, “The computation of Kronecker’s canonical form of a singular pencil,” Linear Algebra Appl., vol. 27, pp. 103–140, 1979. doi: 10.1016/0024-3795(79)90035-1
|
| [49] |
B. D. O. Anderson and J. B. Moore, Optimal Filtering. Chelmsford, MA, USA: Courier Corporation, 2012.
|
| [50] |
T. Pappas, A. Laub, and N. Sandell, “On the numerical solution of the discrete-time algebraic Riccati equation,” IEEE Trans. Autom. Control, vol. 25, no. 4, pp. 631–641, 1980. doi: 10.1109/TAC.1980.1102434
|
| [51] |
R. Bronson, Matrix Methods: An Introduction. Houston: Gulf Professional Publishing, 1991.
|
| [52] |
T. Bessaoudi, F. B. Hmida, and C. S. Hsieh, “Robust state and fault estimation for linear descriptor stochastic systems with disturbances: A DC motor application,” IET Control Theory Appl., vol. 11, no. 5, pp. 601–610, 2017. doi: 10.1049/iet-cta.2016.1235
|
| [53] |
A. Rachid, “A remark on the discretization of singular systems,” Automatica, vol. 31, no. 2, pp. 347–348, 1995. doi: 10.1016/0005-1098(94)00142-6
|
| [54] |
T. B. Gross, S. Trenn, and A. Wirsen, “Topological solvability and index characterizations for a common DAE power system model,” in Proc. IEEE Conf. Control Appl., Dec. 2014, pp. 9–14.
|
Figures(15) / Tables(1)






 DownLoad:
DownLoad: